

Research Highlights
- NIMS-OS (NIMS Orchestration System), a general-purpose software that enables autonomous automated materials exploration by linking robotic experiments and artificial intelligence (AI) without human intervention, has been developed and released as open source software.
- By treating robotic experiments and AIs as modules, various combinations of autonomous automated experiments can be performed.
- We aim to develop standard software for autonomous automated experiments by implementing functions for linking with various robotic experiments and adding a function for transferring data to the RDE which is an automatic data storage system developed by NIMS. NIMS-OS can also accelerated collaborations between the manual experiments and AIs.
Links to Tools, Databases
GitHub: https://github.com/nimsos-dev/nimsos
Manual: https://nimsos-dev.github.io/nimsos/docs/en/index.html
Terminology
- Bayesian optimization
- Active learning
- Robotic experiments
Overview
Research Background
If the robotic experiments and AI for materials exploration are linked, a closed loop is formed that alternately repeats the proposal of experimental conditions, materials synthesis, and evaluation, enabling autonomous automated experiments in materials science. However, since robotic experiments and AI in materials science have been developed independently of each other, they are not designed to work together. Then, in many cases, experiments are conducted by human intervention to form a closed loop that connects these technologies. Therefore, we have developed NIMS-OS, a general-purpose software that aims to easily form a closed loop of autonomous automated materials exploration without any human intervention, and have released it as open-source software.
Research Content
NIMS-OS is implemented in the Python language, and as shown in Figure 2, three main programs are sequentially performed for autonomous automated experiments. The first program, ai_tool.py, is a program in which AI selects one or more candidate materials to be tested next from a database file listing candidate materials. Currently, Bayesian optimization method (PHYSBO), boundless objective-free exploration (BLOX), and active learning method for phase diagram (PDC) are implemented as standard AIs. These AIs for materials exploration can perform materials selection for multi-objective optimization problems that deal with multiple objective functions and batch experiments that test several experiments at once. The second program, preparation_input.py, creates an input file for the robotic experiments and starts the robotic experiments. The third program is analysis_output.py, which analyzes the results of the experiments and updates the database file when the robotic experiments are finished. Two programs of preparation_input.py and analysis_output.py depend on the devices for robotic experiments, and the standard program for the NIMS automated robotic electrochemical experiments (NAREE) is implemented, currently. With a few modifications to these programs, other devices can also be used in NIMS-OS. A GUI version has also been developed and released so that anyone can easily perform autonomous automated experiments.
Research Outcomes
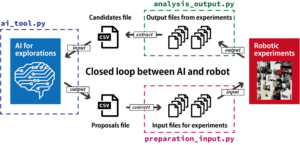
Figure 2. Closed loop created by NIMS-OS.
Future Perspective
We are planning to add functions to NIMS-OS to automatically register measurement data to RDE which is an automatic data storage system developed by NIMS, and to link with various robotic experimental devices. This will accelerate materials exploration and enable the discovery of innovative materials. NIMS-OS is expected to make a significant contribution to the development of data-driven materials research in the future. In addition, since the promising candidates materials can be easily selected by AI using NIMS-OS, the collaboration between the manual experiments and AIs can be also accelerated.
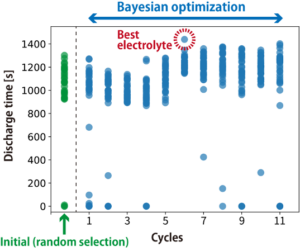
Figure 3. Results of electrolyte search by NAREE and Bayesian optimization controlled by NIMS-OS.
References
Ryo Tamura, Koji Tsuda, and Shoichi Matsuda, “NIMS-OS: An automation software to implement a closed loop between artificial intelligence and robotic experiments in materials science”, Science and Technology of Advanced Materials: Methods 3, 1, 2232297 (2023).
https://www.tandfonline.com/doi/full/10.1080/27660400.2023.2232297
NIMS press release “Development of NIMS-OS: General-Purpose Software Enabling Autonomous, Automated Experiments —Application Coordinates Materials-Search AI and Automated Experiments—”
https://www.nims.go.jp/eng/news/press/2023/07/202307200.html